
三维空间数据解决方案,138 1134 7460

关注龙睿公众号







矿山井下巷道变形监测可视化解决方案
方案应用场景
煤矿巷道的变形和破坏是煤矿生产实践中需要着重考虑解决的问题。煤矿巷道形变是指巷道岩层在受到外力因素作用下其产生的形状和尺寸的变化。巷道变形会造成井下交通中断,生产设备损坏,人员伤亡,导致煤矿生产受到严重威胁。故要及时科学准确的监测巷道形变,进而掌握巷道状态以及形变趋势,方可对煤矿生产安全起到保障作用。
井工矿巷道监测现状
目前井下形变监测采用顶板离层仪方式在巷道内每隔50m取一个断面,在断面上设置四个点,测量两帮点以及顶底板点的距离,将不同时期的数据进行对比,得到其形变量。该方式不能实现对全巷道变形连续监测,存在着数据传递不实时、数据采集不全面、数据形式不直观,测量精度差等问题,同时测量人员劳动量较大,变形监测的效率低,缺少自动分析和比对功能。
技术难点
形变监测项目,与传统扫描项目不同的是,对扫描数据定位精度要求高,且井下观测区域为动态变化环境,每次扫描的控制测量,数据定位是本项目需要解决的主要问题,也是难点。
解决方案
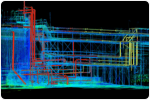
本方案引入三维激光扫描技术、棱镜拼接技术、自研激光点云的巷道断面连续提取与形变分析方法以及三维可视化技术,打破传统三维激光扫描数据采集、数据拼接、数据处理、数据应用固有模式,解决了井下巷道复杂环境下形变监测问题,并应用于实际工程,试验结果表明该方案能够高效的完成井下巷道数据采集,并能够更直观地表现巷道整体变形,可以完成巷道形变动态监测。
方案技术要点
1、采用拓普康GLS-2200全站式三维激光扫描仪进行巷道数据扫描,支持多种拼接方式,能够克服井下湿度大、粉尘多等复杂环境,在保障数据采集完整性、精确性方面具有绝对优势,同时提高了数据采集效率,改善矿区监测数据采集方式;
2、扫描仪支持基于棱镜拼接的方式,解决井下扫描缺少明显特征,线性扫描对象拼接误差大等问题,保障数据拼接精度从而提高监测精度;
3、自研可视化监测平台,基于激光点云的巷道断面连续提取与形态方法,对提取的两期断面进行了形变分析;
2、扫描仪支持基于棱镜拼接的方式,解决井下扫描缺少明显特征,线性扫描对象拼接误差大等问题,保障数据拼接精度从而提高监测精度;
3、自研可视化监测平台,基于激光点云的巷道断面连续提取与形态方法,对提取的两期断面进行了形变分析;
工作流程:
扫描设备
采用拓普康GLS-2000站式三维激光扫描仪进行巷道数据采集
• 全球首创扫描棱镜技术,支持基于棱镜的测站后视法拼接
• 导线测量法 + 七种扫描模式满足各种不同应用需求
• 超高精度 2mm@150 米
• 导线测量法 + 七种扫描模式满足各种不同应用需求
• 超高精度 2mm@150 米
扫描方案
本次采用多站扫描方式,站与站间距控制在30m范围左右,使扫描点云数据精度控制5mm内,以满足巷道内形变监测需求,扫描过程需要配合棱镜,流程如下:
(1)架设仪器以及棱镜:将扫描仪与棱镜架设到合适的架站位置,如有控制点可以选择架设到控制点上。
(2)测量棱镜:利用全站仪测量棱镜架设位置坐标。
(3)后视定向:后视定向扫描棱镜。
(4)开始扫描,根据项目要求选择合适的扫描参数,获取全景点云数据。
(5)换站扫描,同样的步骤开始下一站扫描。
(6)检查数据质量,若数据质量合格,即可将设备搬迁至下一站。记录完成后继续扫描,依次循环,直到扫描到完整点云后,进行数据存储。
(2)测量棱镜:利用全站仪测量棱镜架设位置坐标。
(3)后视定向:后视定向扫描棱镜。
(4)开始扫描,根据项目要求选择合适的扫描参数,获取全景点云数据。
(5)换站扫描,同样的步骤开始下一站扫描。
(6)检查数据质量,若数据质量合格,即可将设备搬迁至下一站。记录完成后继续扫描,依次循环,直到扫描到完整点云后,进行数据存储。
数据拼接方案
点云数据拼接按照精度从高到低的拼接方式依次是:棱镜拼接、标靶球拼接、标靶拼接、特征拼接,拓普康GLS-2000采用的棱镜拼接方式,就是为了保证整体数据精度。采用此方式产生的误差主要是扫描时人员操作的误差,相对其他方式精度最高。

本次数据采用拓普康数据处理软件MAGNET Collage,采用基于棱镜坐标的拼接方式进行数据处理,处理流程如下:
(1)数据导入:导入扫描数据为拼接做准备
(2)控制点坐标导入:将作为控制点的棱镜坐标导入软件并与点云内扫描到的棱镜进行匹配
(3)后方交会-棱镜坐标点赋值-拼接-查看拼接后误差报告,棱镜标靶赋值后点击拼接进行点云空间定位,定位成功后,可查看拼接误差报告。
(4)误差报告在可控范围内,则利用相同的流程完成剩余站位的拼接。
(2)控制点坐标导入:将作为控制点的棱镜坐标导入软件并与点云内扫描到的棱镜进行匹配
(3)后方交会-棱镜坐标点赋值-拼接-查看拼接后误差报告,棱镜标靶赋值后点击拼接进行点云空间定位,定位成功后,可查看拼接误差报告。
(4)误差报告在可控范围内,则利用相同的流程完成剩余站位的拼接。

数据分析方案
解决方案将断面分析技术用于井下巷道形变监测,针对巷道环境点云数据及实际需求自主研发数据优化及数据分析技术,主要包括:
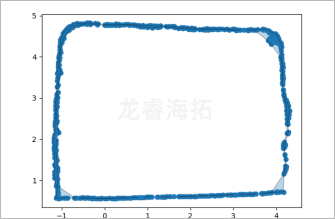
(1)非点滤除技术:采用该技术可以快速自动去除原始点云数据中包含有不属于巷道断面上的点(简称非点),如水袋、管道、小车、人、电缆、照明设备以及激光雷达扫描过程中的异常离群点等附着物。
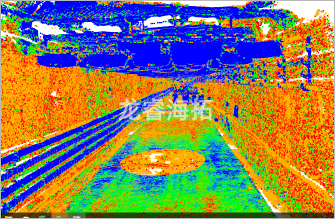

原始点云图像
去除非点的点云图像
(2)基于激光点云的巷道断面连续提取与形变分析方法:对提取的两期断面进行形变分析,得到各边帮形变情况
原始点云图像
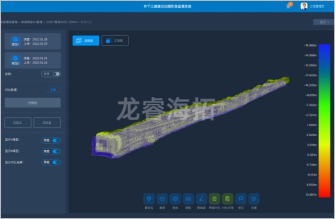
三维立体管理监控平台
三维立体管理监控平台主要是负责进行巷道数据文件管理的数据管理系统,除此之外还会对系统用户和不同巷道的数据进行分类管理。主要有以下功能:
1. 巷道管理
管理现有巷道,用户只要进行新增巷道或删除巷道操作,巷道数量会根据操作实时进行更新。

2. 巷道数据可视化
巷道数据可视化管理模块,实现对每次扫描数据的存储、三维可视化浏览、三维量测、对比结果查看、形变预警记录标记及查看。

3. 巷道数据4D管理
巷道数据可视化管理模块,实现对每次扫描数据的存储、三维可视化浏览、三维量测、对比结果查看、形变预警记录标记及查看。

4. 模型对比
用户在巷道模型4D管理-点云模型列表任选两个点云模型后完成模型对比,支持进行点云总体对比及截面对比,输出对比日报、关键点标记等操作,可实现超限预警。



5. 监测报告
根据用户需求进行报告输出,主要包括本次对比产生的预警数量和预警信息的详细数据列表、两次模型和最新模型与初始模型的详细对比数据(如巷道底板下沉量、顶板偏移量、回采侧移动量、煤柱侧移动量等信息)、巷道初始详细数据、附件文件等数据信息。

顶部